
Тут я бы хотел разобрать понятие «полезная нагрузка». Что в неё входит, какая она бывает и как функционирует. И закрыть часть вопросов что ранее оставлял на потом.
Для начала, полезная нагрузка в общем смысле — это масса груза, для транспортировки которого создана данная конкретная система. Так, в принципе, можно говорить, что для первой ступени последующие являются ПН.
Для ракеты в целом ПН в первую очередь — это масса той нагрузки, которую ракета доставляет с заданной скоростью и её направлением. В этом смысле это синоним забрасываемого веса ракеты.
Итак, как конкретно выглядит содержимое полезной нагрузки?
Если подойти к вопросу исторически, то в первую очередь это была одиночная боевая часть, причём неотделяемой от ракеты.
Со временем, для облегчения конструкции дальнобойных ракет, перешли на отделяемые боевые блоки ББ – совокупность боевой части и корпуса с теплозащитой, двигающейся отдельно от ракеты после окончания активного участка траектории (АУТ). Теперь в массу ПН входит масса одиночного ББ (и иногда системы управления).

Можно упомянуть, что боевые части бывают: фугасные, осколочные, ядерные, химические, кассетные и комбинированные etc. etc.
Автоматика подрыва – это непосредственно набор систем, которые определяют в какой момент необходимо произвести взрыв, и подают соответствующий сигнал на взрыватели. Исторически самыми первыми и простыми были контактные датчики – активация заряда производилась при ударе о поверхность. И хоть потом они не пропали, но возникла проблема, что для наибольшего эффекта уже ядерного заряда необходимо подрывать его на высоте порядка 300-500-1000 метров, в зависимости от мощности. Да и другим видам зарядов это тоже нередко бывает выгодно.
Современные ББ вычисляют свое положение встроенной инерциальной навигационной системой. В отличие от сложных и габаритных систем управления на основной ракете (гиростабилизированная платформа, высокоточные акселерометры), о которой я расскажу потом, она малогабаритна и менее точна. По координате выдаётся команда на подрыв. Это может быть простой высотный подрыв или адаптивный в оптимальной к заложенной в автоматике точке цели [11].

Боевой блок может иметь собственные органы управления и даже двигательную установку. По этому критерию можно выделить несколько разных видов ББ: неуправляемый, маневрирующий, самонаводящийся. Неуправляемый — это простейший описанный выше случай, когда ББ не создаёт никаких управляющих усилий и не способен к маневрированию.
Отличия между маневрирующим и самонаводящийся состоят в том, что первый отрабатывает заранее заложенный в него манёвр уклонения от ПРО или манёвр наведения на цель, но не получает активно координаты цели. Самонаводящийся имеет средства уточнения взаимного положения себя и цели, например активный радар, и маневром в атмосфере корректирует ошибку. Где-то между ними лежит ББ с внешней корректировкой положения цели.
Также можно выделить находящиеся слегка в стороне планирующие крылатые блоки по типу Авангарда и блоки со своей орбитальной ДУ, по типу Р-36орб. Они оба выделяются среди вышеописанных полетом по другим траекториям.
Крылатый блок совершает управляемый полёт в верхних слоях атмосферы. Это может быть как горизонтальный полёт на одной высоте, так и «рикошетирующая» траектория, подобная сильверфогелю, а также их вариации.
Крылатый блок выгодно отличается именно своей высотой полёта и низкой траекторией. С одной стороны, с точки зрения цели он долгое время находится под радио горизонтом, что затрудняет его обнаружение и поражение. С другой стороны, он оперирует в таких слоях атмосферы, когда заатмосферные перехватчики ещё не могут эффективно по нему работать, а низковысотное ПВО-ПРО уже не может. Кроме того, его способность выполнять манёвры и отчасти огибать позиционные районы ПРО также повышает способности блока к ее преодолению.

К однозначным недостаткам нужно отнести существенное при прочих равных снижение массы доставляемых ракетой боезарядов (по оценкам на основе открытых источников УР-100Н УТТХ с планирующим ББ доставляет примерно в 3 раза меньше совокупного мегатоннажа чем с неуправляемыми ББ), а также постоянное падение скорости ББ по мере полёта.Потерялась, ну почти, потерялась или сильно осложнилась возможность иметь разделяющуюся головную часть индивидуального наведения.
Орбитальная головная часть де-факто выходит на круговую орбиту вокруг Земли, и сходит с неё собственной ДУ не заканчивая один полный оборот. Это позволяет обойти мощное ПРО НОРАДа на севере североамериканского континента, и подлетать с южных направлений. Дальнобойность при этом, по вполне понятным причинам, неограниченная. В принципе, при достаточном запасе по носителю, на подобную «обратную» траекторию можно вывести и обычные блоки, что заявляется возможным для Сармата.
Система управления (СУ), в общем случае, состоит из измерительных органов, системы обработки информации и выработки ответного сигнала, и систем доведения сигнала до органов управления ракеты. Совокупность измерительных органов и системы анализа поступающей с них информации для получения линейных и угловых координат и скоростей называется навигационной системой.
Рассмотрим устройство СУ именно самой ракеты, а точнее как она узнаёт своё положение в пространстве. Если знать ускорения по трём осям в каждый момент полёта, то из них, разумеется зная скорость в момент перед этим, можно получить текущую скорость – так называемая интеграция. Такая скорость называется кажущейся – то, как это «кажется» ракете на основании ускорений. И аналогично из скорости в каждый момент времени можно получить кажущиеся координаты.
Ускорения можно измерить акселерометрами. В самом утрированном виде это просто грузик на пружинке, способный двигаться вдоль одной оси. Зная характеристики пружинки и груза из сжатия пружинки (координате груза) можно определить действующие вдоль оси пружинки ускорения. На самом деле непосредственно в таком виде систему особо не применить, но принцип ясен.
Для определения траектории необходимо также знать угловое положение ракеты в каждый момент времени – направления ускорений. Для этого используется гироскопический момент. Не вдаваясь вглубь, раскрученное вокруг оси тело стремится сохранить положение в пространстве этой самой оси.
На самых первых ракетах это явление использовали «в лоб», и просто подвешивали маховики в карданные подвесы, напрямую считая что его ось вращения отклоняется от исходного положения пренебрежимо мало и измеряя угол между ней и текущим положением ракеты, таким образом узнавая угловую ориентацию ракеты. А акселерометры устанавливали просто по осям ракеты, измеряя ускорения в связанной системе координат, т.е. оси измеряемые ускорения совпадают с главными осями само ракеты.
Такая система обладает рядом минусов. Во-первых, под действием ускорений в ракете, «простой» гироскоп будет подвергаться прецессии – повороту оси гироскопа. Во-вторых, точность интеграторов страдает от привязки их оси к связанной системе координат СК (неинерциальной) вместо стартовой СК (частный случай инерциальной), т.е. когда оси СК совпадают с осями, проведёнными от стартового комплекса по направлению стрельбы.
Всё это вместе с развитием науки и техники так или иначе привело к созданию существенно более софистичного прибора. Не вдаваясь в подробности (интересующихся отсылаю к [1] Глава VIII заголовок «Гиростабилизаторы»), там используется совокупность из 3-х гироскопов, каждый из которых используется для точного исключения поворота только вокруг одной оси, а сам гироскоп имеет систему поддержания себя в правильной ориентации. Каждая такая система с одним гироскопом в сборе называется одноосевым стабилизатором. Совокупность трёх одноосевых стабилизаторов позволяет получить трёхосевой стабилизатор. А уже с его помощью платформу, ориентация которой с высокой точностью зафиксирована в пространстве, на которую можно размещать чувствительные элементы системы навигации. Всё это в сборе называется гиростабилизированной платформой, общепринятое сокращение ГСП, а окончательно ИНС (инерциальная навигационная система) ГСП.
Весят современные системы управления порядка 100-140 кг ([5], [6]).
В середине-конце 60-х появились первые ракеты с разделяющейся головной частью, т.е. несколькими блоками. Однако самые первые ракеты ещё не имели способности к их индивидуальному наведению – блоки просто расталкивали друг от друга. Таким образом, точное наведение было возможно только для одного блока, а остальные ложились уже с большим отклонением. Такие ракеты называли ракетами с разделяющейся головной частью (РГЧ) рассеивающегося типа, а на западе MRV (multiple reentry vehicles).

В первую очередь этот переход производился по двум причинам. Первое, с повышением точности носителей и повышением энергоэффективности ядерных боезарядов существенно выросла эффективность блоков меньшей массы. А таких блоков существующие носители могли нести несколько. Второе, с мыслью о повышении вероятности прорыва перспективных разрабатываемых систем ПРО противника. Что из этого первично дискуссионно. На основании цифр из открытых источников непосредственная суммарная площадь поражения получалась меньше чем у моноблочного исполнения.
На самом деле, примерно в это время ещё начали появляться первые специализированные средства преодоления ПРО (СП ПРО), но о них я расскажу в отдельной заметке.
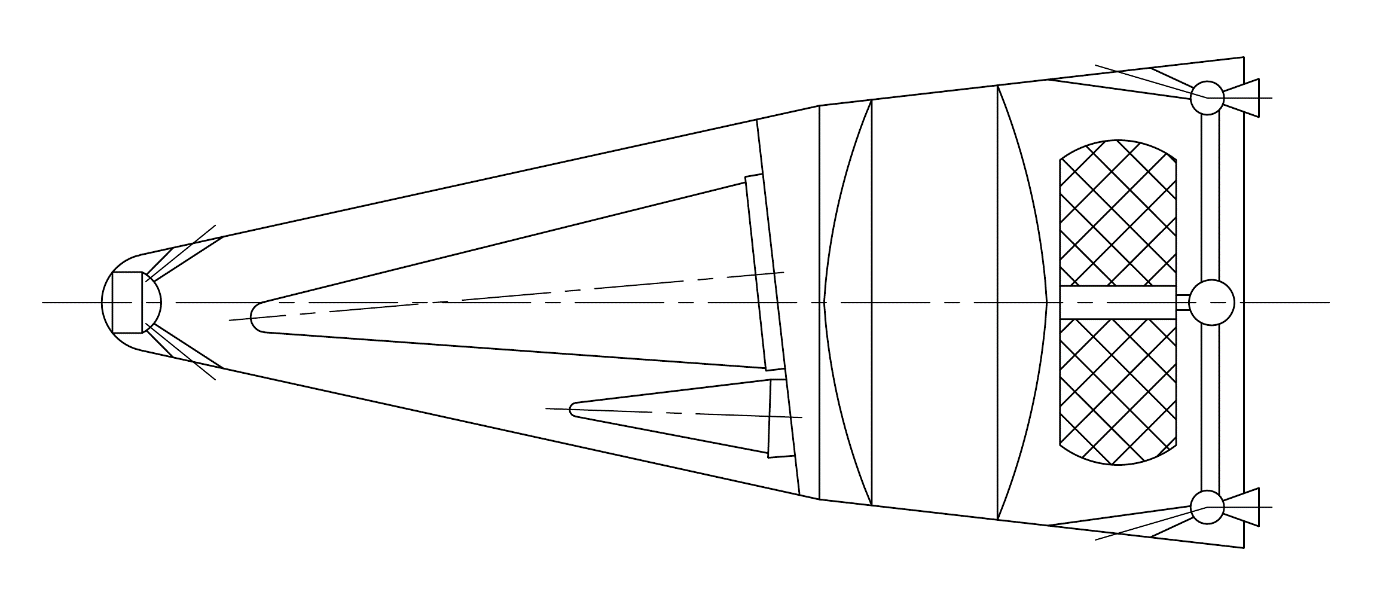
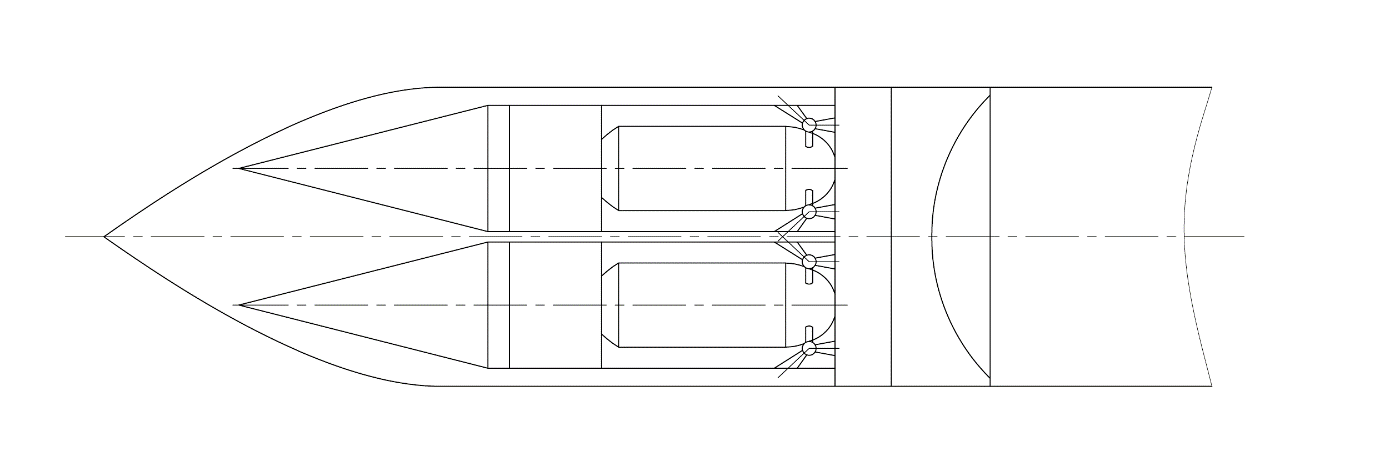
Затем произошло внедрение РГЧ индивидуального наведения (РГЧ ИН; MIRV — multiple independent reentry vehicles). Т.е. такой системы, которая была способна наводить каждый ББ точно на одну или даже ряд индивидуальных целей (разводить ББ / перенацеливать ББ). Для этого в состав ракеты была введена боевая ступень. Это специальная ступень, в задачу которой входит компенсация промаха носителя и затем построение боевых порядков ББ и СП ПРО на конкретные цели.
![Примеры компоновочных исполнений боевых ступеней из [8]](https://lh6.googleusercontent.com/J3UN_XEmoY1NSZ710IWQ1twZhoc_59BFW4uBdIUbDuixe0WSmj4B8Jo1tqBVM0olUbzfZaigFv2mvmT4a7gNbLAcl-XCJCNd7EmY-wz0FyrA3k8m5fOHw1fr2qJmqz_qU4adxM3xKfxzakBH6g)
Кроме всего прочего, БС также полезна даже для одиночного ББ, даже без дополнительного СП ПРО, что соответствует первому видео. Во-первых, наведение на цель при помощи БС на низкой тяге таки позволяет сделать это точнее, чем просто третья ступень. Во-вторых, она позволяет сориентировать блок именно в том направлении, в каком он затем будет входить в атмосферу. Это убирает период период “болтанки” и установки ББ в стабильное положение, что снижает разброс на атмосферном участке. Подробнее про последнее будет в заметке про боевые блоки.
Всё вышеописанное справедливо если на последней маршевой ступени не было отдельных двигателей малой тяги (ДМТ) для ориентации и маневрирования для (в том числе) специально этих целей
К слову, вопреки некому убеждению, навеянному KSP, управляемые, регулируемые и даже многократно включающиеся-выключающиеся твердотопливные двигатели существуют. И они нередко применяются как ДУ боевых ступеней. В частности это американские баллистические ракеты подводных лодок (БРПЛ) Trident и все ракеты разработки Московского института теплотехники.
Самый простой вариант – это твердотопливный газогенератор, распределяющий генерируемый газ между несколькими дискретно включаемыми-выключаемыми соплами для управляемого полёта. Более сложный вариант – это двигатель глубокого регулирования ДГР. Он также представляет собой газогенератор, но уже с возможностью плавного изменения площади критического сечения каждого сопла. За счёт управления совокупной площадью всех критических сечений производится регулирование давления в камере сгорания, а она в свою очередь меняет скорость горения шашки. Глубина регулирования тяги (отношение значения высокой тяги к низкой) может составлять 5-10 единиц.
ДГР тяжелее нерегулируемого газогенератора, но позволяет быстрее производить разведение ББ за счёт пролёта долгих участков компенсации промаха носителя и перенацеливания на высокой тяге, а отделение ББ производить с высокой точностью на низкой тяге. Время разведения важно для преодоления первых эшелонов ПРО противника.
Возникает логичный вопрос как можно снизить это время ещё больше. Есть способ скачкообразно сократить время разведения для РГЧ – это разбить боевую ступень на несколько небольших БС. В пределе так, что на каждый ББ/БЭ есть своя боевая ступень, каждая со своей СУ и ДУ. Это становится блоком индивидуального разведения БИР ([3], [4]). А всё вместе это начинает называться РГЧ индивидуального разведения (РГЧ ИР).
Возникает проблема что требуется СУ для каждой такой небольшой БС – это существенные потери по массе. Приходится либо мириться с большой массой, либо использовать более лёгкие ИНС без ГСП, подобные тем что ставят в ББ. Точность в инерциальном режиме при этом существенно упадёт. Какие ещё бывают и могут быть режимы расскажу потом в отдельном тексте.
И логика разведения для РГЧ ИР меняется в соответствующую сторону: теперь носитель забрасывает БС в некоторую точку между точками сброса, а потом каждая БС разлетается в свою сторону.
И на этом всё на сегодня. В следующий раз поговорим про баллистику.
Информация о произведении
Автор: Антон Серебров
Редактор, факт-чекер: Максим Падалка
Условия использования: свободное некоммерческое использование при условии указания людей участвовавших в его создании и ссылку на первоисточник (статьи на действующем сайте интернет-журнала «Стройка Века»).
Для коммерческого использования — обращаться на почту:
buildxxvek@gmail.com
Список литературы:
[1] Феодосьев В.И. Основы техники ракетного полета 2-е издание / Феодосьев В.И. – Москва: «Наука», 1979. – 496 с.
[2] Проектирование и испытания баллистических ракет / под ред. В.П. Варфоломеева и М.И. Копытова – Москва: Военное издательство минобороны СССР, 1970. – 392 с.
[3] Николаев Ю.М. Инженерное проектирование управляемых баллистических ракет с РДТТ / Соломонов Ю.С. – Москва: Военное издательство минобороны СССР, 1979. – 240 с.
[4] Николаев Ю.М. Основы проектирования твердотопливных управляемых баллистических ракет часть 1 / Соломонов Ю.С. – Москва: изд. МГТУ, 1998. – 104 с.
[5] Николаев Ю.М. Основы проектирования твердотопливных управляемых баллистических ракет часть 2 / Соломонов Ю.С. – Москва: изд. МГТУ, 2000. – 140 с.
[6] Павлюк Ю.С. Баллистическое проектирование ракет: учебное пособие для вузов. – Челябинск: изд. ЧГТУ, 1996 – 92 с.
[7] Управляемые энергетические установки на твёрдом ракетном топливе / В.И. Петренко, М.И. Соколовский, Г.А. Зыков и др. под общей редакцией М.И. Соколовского и В.И. Петренко – Москва: «Машиностроение», 2003 – 464 с., ил.
[8] Усолкин Ю.Ю. Проектирование головных частей баллистических ракет: Учебное пособие. – Челябинск: изд. ЮУрГУ, 2005 – 41 с.
[9] Оружие России, каталог, том IV, Вооружение и военная техника Ракетных войск стратегического назначения / Сергеев И.Д. и др. – ЗАО «Военный парад», 1997 – 465 с.
[10] Сайт Military Russia [Электронный ресурс] / Режим доступа: http://militaryrussia.ru/
[11] Ядерный щит / А.А. Грешилов, Н.Д. Егупов, А.М. Матущенко – изд. Логос, 2009 – 522 с.